

Autonomy in off-road highly dynamic environments, without network access
Augment vision and perception in highly dynamic environments.
Semantic labelling
Guidelines
Dynamic routing
Network free navigation
Object avoidance
Proximity detection
Navigate in dirty conditions
Map maintenance
Small spaces

Coming next
Autonomous job prioritization. Enabling a machine to independently and automatically prioritize its most important tasks and dynamically route in real time.

Try the Opteran Mind
We provided several approaches to test our general purpose autonomy.
Simulation

Our algorithms integrated with the Unreal Engine allow you to test the Opteran Mind in simulations that represent your business needs.
Reference hardware
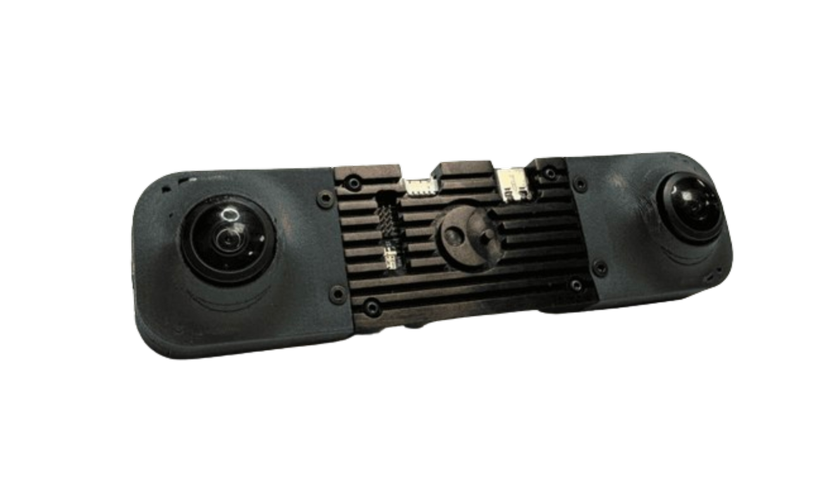
The Opteran Development Kit (ODK) with integrated software, hardware and pre-calibrated cameras allows you to integrate Opteran algorithms directly into your machine. Simply, plug in a USB or Ethernet to access PX4 over Mavlink or ROS APIs and get going.
Reference machines

To simplify this, we have pre-integrated the ODK into a drone and ground-based robot to allow you to test the Opteran Mind quickly and simply.